Home
Product
Embodied
Embodied Tien Kung3.0
Tian Yi 2.0
Intelligent
HuiSi KaiWu
Embodied World Model
A Visual Language Model for Robots
Data
Embodied AI Data
Application Scenarios
Video
Open-Source Community
News
About Us
简体中文
English
Language
简体中文
English
Home
Product
Embodied
Embodied Tien Kung3.0
Tian Yi 2.0
Intelligent
HuiSi KaiWu
Wow
PelicanVLM
Data
Application Scenarios
Video
Open-Source Community
News
About
一脑多机 一脑多能
通用具身智能平台
N
应用场景
200
w+
机器人轨迹数据
20
+
机器人本体
-
90
%
开发人力与时间
一脑多能/一脑多机
一脑多能/一脑多机
一脑多能
一脑多机
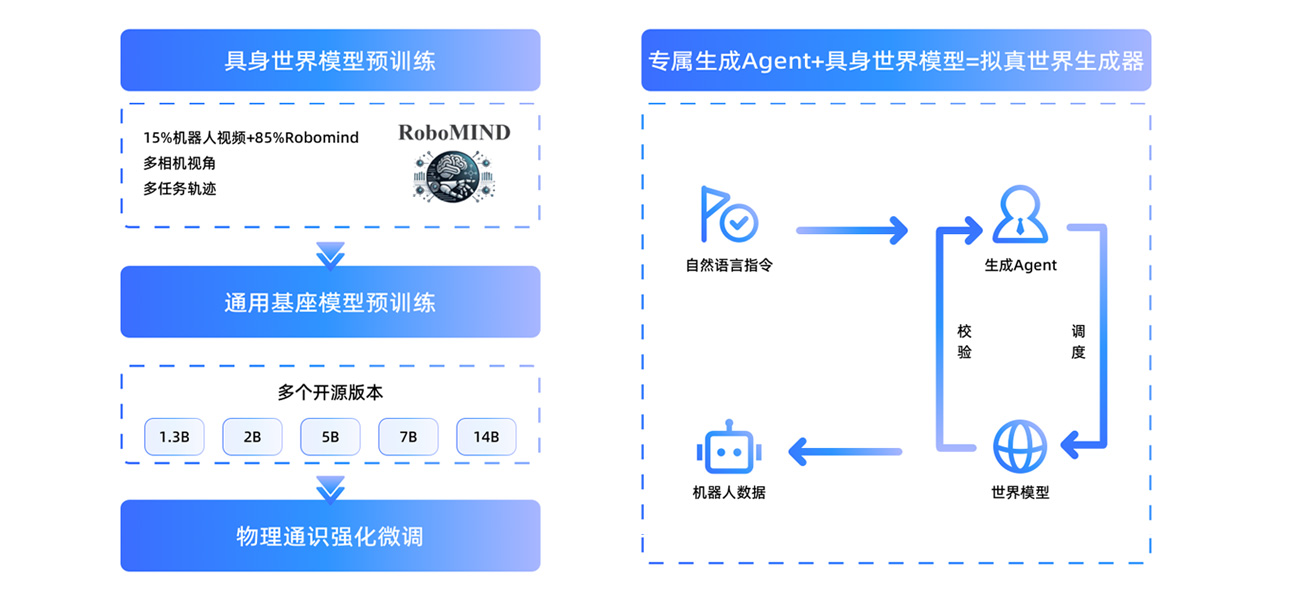
具身大脑:天悟——Wu1.0具身智能世界模型
了解更多
具身大脑:PelicanVLM——为机器人时代打造的视觉语言大模型
了解更多
世界模型
VLM
具身小脑:跨本体VLA基座模型XR-1
多本体多任务多场景泛化应用 少样本快速迁移
具身小脑:全身控制自主导航系统
自主移动导航 避障绕障 鲁棒抗扰移动操作
Top
©️2024 北京人形机器人创新中心有限公司版权所有|
京ICP备2024078606号
|
京公网安备11011202100775号