


5月15日,焉知人形机器人科技创新大会在上海召开,大会聚焦具身智能、运动控制、关节模组等核心议题,吸引产业链上下游企业、科研机构及资本方代表共议人形机器人技术突破与产业未来。北京人形机器人创新中心具身智能负责人车正平受邀出席主论坛并发表主题演讲,系统阐述数据与算法协同驱动具身智能发展的创新路径。同期,大会揭晓“焉知知鼎奖”评选结果,北京人形机器人创新中心(以下简称“北京人形”)凭借领先的具身智能技术能力与开源开放的技术生态,荣膺“年度最具价值投资奖”。
主论坛现场,车正平发表了题为《数据算法双螺旋驱动具身智能范式演进》的主旨演讲,从当前具身智能产业化落地的核心挑战切入,阐述了北京人形以数据与算法协同驱动技术普惠的实践路径。
全球具身智能领域正经历革命性跃迁,中国‘机器人+’行动、美国国家机器人计划3.0(NRI 3.0)等战略相继落地,推动技术从实验室向产业端快速渗透。然而,硬件本体稳定性与智能化系统通用性仍是制约行业规模化落地的关键瓶颈。
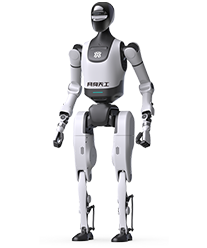
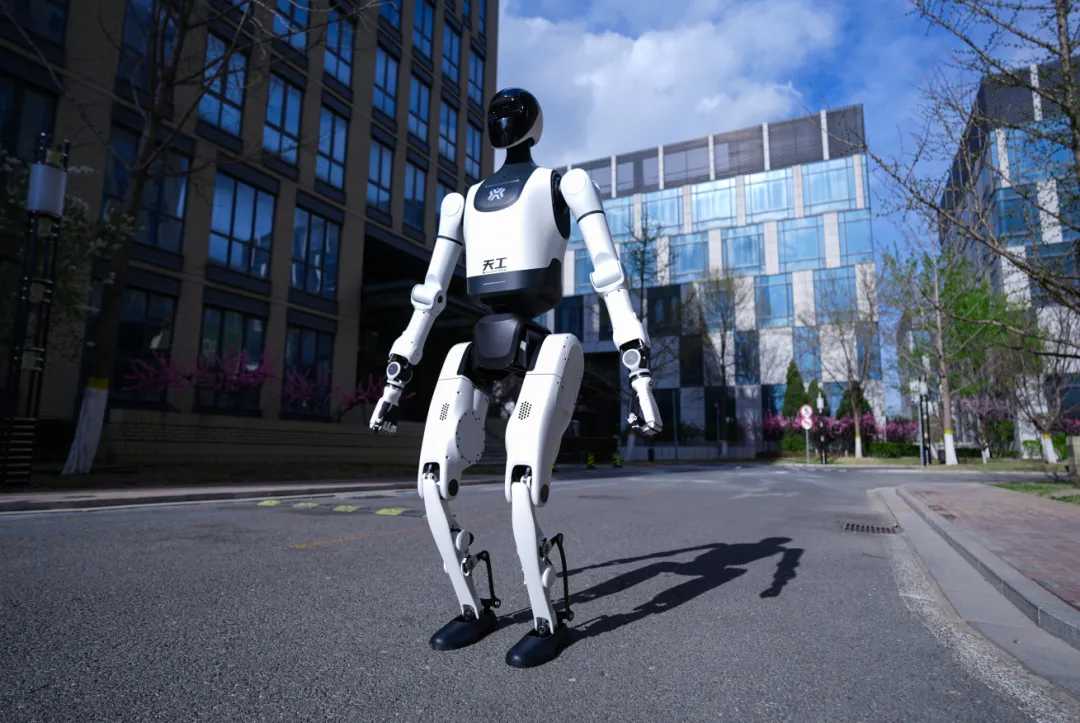
针对这一问题,车正平表示,北京人形打造了“硬件开放+智能复用”这一开放协作的生态体系,通过通用机器人平台“天工”和通用具身智能平台“慧思开物”推动产业生态化协同发展。“天工”系列最新产品“天工2.0”是国内首个实现了针对复杂地形的自适应行走的人形机器人,搭载双电池快换电系统,拥有首个工业级机器人永续作业能力。在打通硬件开放生态的同时,为了解决智能化系统的通用性的问题,北京人形发布了支持多本体多场景应用的通用具身智能平台“慧思开物”,通过统一架构,打破传统机器人开发模式,解决了行业长期存在的碎片化、泛化性难的问题,通过平台化的方式实现具身智能算法和软件侧的通用。
硬件与软件的双重突破,为数据价值释放奠定了基础,而数据孤岛林立、场景适配效率低、技术路线碎片化导致大量底层能力重复建设等问题制约着具身智能的规模化应用。针对这一现状,车正平阐释了“数据与算法双螺旋驱动”理念,强调北京人形打通数据采集、算法迭代与场景验证的全链路,通过构建开放协作的生态体系,将分散的技术能力转化为可复用的基础设施,构建具身智能新范式。
在具身数据层面,为了推动具身数据的规模化供给并提高其价值转化效率,北京人形构建了真机与仿真双轨并行的数据生态,推出了全国首个通用具身智能数据集和Benchmark RoboMIND。当前,RoboMIND已开放高质量具身智能数据10.7万条,并开源了 RoboMIND 数据集和“天工”机器人对接成熟开源算法框架的训练工具链X-Humanoid Training Toolchain,有效降低开发门槛。“数据飞轮效应需要全行业共建共享”,车正平呼吁产业链伙伴加入数据采集、治理与场景评测合作,加速技术迭代,共同推动具身智能在工业、家庭等场景的规模化落地。
在算法层面,北京人形持续推动具身智能算法创新:针对模仿学习,北京人形首创失败样本自监督筛选机制,提升对失败数据的利用效率;在多任务学习中,北京人形技术团队开发了多任务操作策略模型,通过生成任务相关动作隐变量实现精准动作生成;为解决铰链物体建模难题,北京人形设计了多模态几何先验重建算法,仅凭RGB图像自动构建参数化模型;并构建双分支补全网络,提升室内深度数据的完整性与感知精度。这一系列算法创新构建了“慧思开物”平台智能决策与技能执行的能力底座,不仅实现多本体、多场景的通用适配,也为具身智能的快速部署与落地应用提供了坚实支撑。
在同期举办的焉知知鼎奖颁奖典礼上,北京人形从百余家参评企业中脱颖而出,通过“天工开源计划”、通用具身智能平台“慧思开物”与具身智能数据生态共建,北京人形积极推动行业从单点突破转向协同创新,为具身智能商业化注入新动能,获评“年度最具价值投资奖”。

站在人形机器人技术范式革新的关键节点,北京人形将持续深化开源生态建设,以“天工”和“慧思开物”双平台为基座,联合全球开发者共建数据飞轮与算法迭代闭环。通过牵头制定人形机器人基础共性技术标准、跨模态数据治理规范及场景应用评价体系,推动行业从单点创新迈向系统化突破,加速产学研用协同,聚焦智能制造、特种作业等场景的规模化验证,构建技术普惠、生态繁荣的具身智能新图景。