


具身智能体作为人工智能与实体机器人深度融合的关键载体,依托多模态感知与智能决策能力,驱动机器人执行复杂任务,已成为人形机器人、服务机器人、工业协作体等智能化、高协同演进的核心路径。
近日,由北京人形机器人创新中心(下称北京人形)牵头,《人工智能 具身智能体应用框架及接口规范》团体标准在中国电子工业标准化技术协会“正式立项。具身智能体应用框架及接口标准化的推进,将为产业高质量发展奠定关键基础。
工白业和信息化部在《人形机器人创新发展指导意见》中设定了“到2025年初步建立接口与评价标准体系”的目标。2024年印发的《国家人工智能产业综合标准化体系建设指南(2024版)》中,也明确提出应"加快制定具身智能体接口标准"要求。随着人形机器人与具身智能加速从实验室走向商业化,行业对标准化的需求愈发迫切。
当前,我国具身智能体在研发加速的同时,正面临“平台异构、接口割裂、功能模块封闭”等问题。跨模型、跨本体、跨平台接入时,由于缺乏统一标准,导致三类突出问题:适配成本高昂(需为每类本体定制协议,集成周期长、成本高)、能力复用性差(模块化接口缺失阻碍技能迁移共享)、开发门槛高(接口描述不规范、边界不清限制生态发展与应用效率)。
为破解行业困局,北京人形牵头联合中国电子技术标准化研究院、北京小米机器人技术有限公司等产学研用单位共同起草,旨在提出具身智能体应用框架及接口,广泛适用于人形机器人、智能服务机器人、工业协作智能体等具身系统研发与部署,提升系统能力封装标准化水平,推动平台化协同开发。
《人工智能 具身智能体应用框架及接口规范》团体标准首次系统性构建了具身智能体的分层应用框架与标准化接口体系,适用于以人工智能模型为核心、具备多模态感知、智能决策与任务执行能力的具身智能体,特别是需跨本体接入与能力复用的应用场景。推动实现AI能力与物理执行的解耦及高效能力复用,加速技术创新与规模化应用。
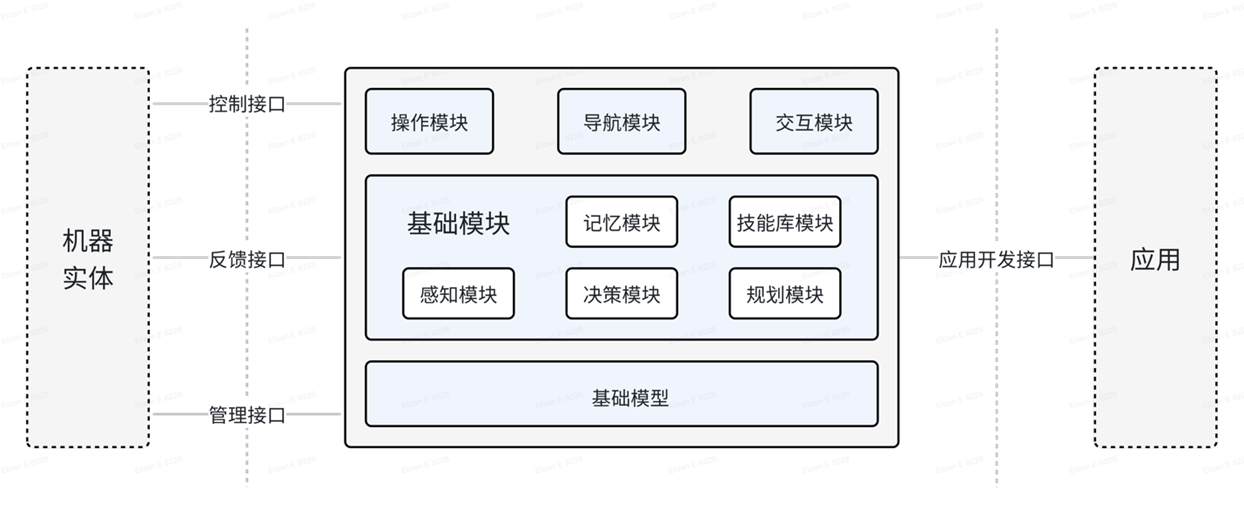
该标准创新性地定义了"基础模型层-基础模块层-开放功能层”的分层模块化框架结构。清晰界定名层功能边界、相互关系及其与接口的关联,并规范推荐通信机制、统一的交互方式、消息结构及语义。通过明确具身智能体应用框架的构建内容,为具身智能系统的模块化设计和开发提供规范指
在技术要求上,该标准重点规范四大核心接口,详细制定控制接口(运动/操作指令)、反馈接口(环境/自身状态/传感器数据)、管理接口(系统监控/错误上报/远程运维)和应用开发接口(任务调度/技能调用/行为编排)。通过统一具身智能体关键接口规范,促进不同厂商AI能力、机器人硬件平台及上层应用间的互操作性和能力复用,降低集成成本,加速具身智能技术在各行业的应用创新和产业生态发展。
《人工智能 具身智能体应用框架及接口规范》标准的制定,是具身智能产业协同创新的重要成果。在构建统一框架,确立标准化模块结构与接口映射,提升系统通用性与扩展性的同时,还将推动平台解耦,通过规范接口通信与数据结构,降低机器人本体接入门槛。同时,为上层任务开发与行为编排提供稳定接口,构建可复用、可组合的开发生态,也将显著提升开发效率,助力国家人工智能标准体系建设,填补关键接口空白,为具身智能系统研发部署提供核心支撑。
作为具身智能领域的标准制定者与生态构建者,北京人形将持续为具身智能的模块化开发、高效系统集成和应用创新提供至关重要的统一规范,减少重复造轮子,打造繁荣的具身智能生态圈,加速推进产业规模化应用。