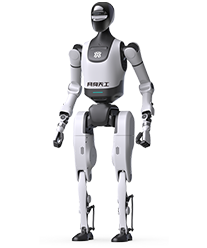



在具身智能快速发展的今天,机器人正逐步从想象走入现实世界。相比较结构稳定、步态控制简单的四足机器人,人形机器人的本体结构和运动控制要复杂得多。创新中心发布的“天工”机器人实现了全球首例全尺寸纯电驱人形机器人的拟人奔跑,而特斯拉、Figure AI、Agility Robotics等国外顶尖机器人公司均未展示过纯电驱人形机器人的奔跑能力,仅加州大学伯克利分校研发的半身双足机器人Cassie可以实现双足奔跑。全尺寸人形机器人的户外运动能力是全球顶尖机器人公司与科研机构都在努力提升的方向。
视频中,“天工”机器人在35摄氏度的高温天气实现了长程室外行走,稳定通过易滑硬化路面、柔软湿滑的草地、砖石路、减速带、斜坡等多种复杂地形,体现了其强大的泛化能力。
除了长程多地形行走,“天工”机器人还能在室外多地形实现无保护奔跑。
“天工”机器人走出实验室,在无保护的情况下在亦庄机器人产业园区的多种地形稳定实现了拟人奔跑,在狭窄的灌木丛中穿梭自如,并围绕凉亭做连续圆周奔跑。
不同于实验室的标准环境和全方位保护,室外环境恶劣且复杂多变,无保护户外奔跑需要机器人拥有稳定的本体结构和强大的运动控制能力,能够快速响应内外部变化,保持软硬件的鲁棒性。
人形机器人在奔跑时,以脚为支撑点与地面进行间断性接触,频繁且大力度地受到地面冲击,需要具备高强度的本体结构。同时,在长程高速奔跑的过程中,机器人需要以高能量密度、大扭矩、大转速、长续航的高性能关节结构作为动力来源,和良好的整机散热能力作为稳定运行的保障。自发布以来,创新中心不断对母平台“天工”进行迅速的更新迭代,当前,“天工”不仅拥有可以稳定实现室外奔跑的本体结构,且速度最高可达7.2km/h。
为了赋予人形机器人更强大的运动能力,创新中心独立自主研发了“基于状态记忆的预测型强化模仿学习”运动控制方法。该方法将动力学方法的核心机理、人类运动数据和强化学习方法有机融合,既解决了强化学习带来的定位精度差的问题,又解决了模型预测控制方法当中对于非结构化环境适应性差的问题,最终达到更稳健、更拟人、更泛化的效果。
强大的户外行走和奔跑能力是人形机器人在多场景落地应用的基础,未来,“天工”将凭借其突出的运动控制能力,在危险环境替代人类进行作业,执行多种任务,例如灾难救援、高压电力巡检等。同时,随着具身智能能力的不断加强,“天工”也将在工业制造、商业服务、养老陪护等多个领域发挥关键作用。